Что такое коллаборативные роботы?
В современном мире робототехника приобретает все более широкий размах, завоевывая новые области человеческой деятельности. Коллаборативные роботы (КР) являются одной из ветвей ее развития, направленных на повышение эффективности и безопасности. Эти устройства заслуживают особого внимания.
Коллаборативные роботы (Collaborative Robots) — что это?

Коллаборативный робот (Collaborative Robot) или кобот представляет собой автоматическое устройство, работающее совместно с человеком. Он является продуктом концепции Human-robot collaboration (HCR) — сотрудничество человека и робота. Если робот в обычном своем понимании предназначен для автоматической работы по заложенной в него программе независимо от рядом работающих людей, то КР призван учитывать их расположение и сотрудничать с человеком.

Как и у любого робота, основу КР составляет программное устройство управления и манипулятор, способный совершать определенные действия. Отличается он тем, что в нем дополнительно устанавливаются оптические датчики, датчики движения и обратной связи. С их помощью учитывается расположение находящихся рядом людей, что исключает нанесение им травм. Управляющая программа (УП) короботов составляется так, чтобы обеспечивалось сотрудничество с человеком. По сути, это робот-помощник. Человек все время направляет его работу, вносит необходимые коррективы, в т. ч. с помощью ручного управления.
Важно! За счет потери полной автономности КР становится значительно проще и дешевле промышленного робота. Как правило, он имеет меньшие размеры: высота порядка 140–150 см и вес 20–25 кг. Устанавливаются они обычно непосредственно на рабочем месте и ориентированы на выполнение определенных работ.
Применение промышленного коллаборативного робототехнического оборудования

Промышленные КР находят широкое применение в следующих областях:
Применение КР не ограничивается перечисленными сферами деятельности человека. Они постоянно совершенствуются, что расширяет их возможности.
Лучшие коллаборативные роботы
Международный стандарт предусматривает 4 основных типа КР.

Можно выделить следующие топовые бренды:
В настоящее время список производителей КР существенно расширился. Свою продукцию предлагают такие компании, как ABB, Yaskawa, Kinova, Rethink Robotics, Franka Emika, Rozum Robotics.
Преимущества коллаборативных манипуляторов

Внедрение КР в производство приносит следующие преимущества:
Важно, что в отличие от автономных роботов, для КР не требуется специальная площадка. Короботы не способны полностью автоматизировать производственный процесс, а их основная задача — эффективное сотрудничество с человеком. Они работают рядом с ним и становятся его настоящим, неутомимым помощником, облегчая труд и повышая производительность.
Как роботы могут работать с человеком вместе (а не вместо)
В прошлом посте мы рассказали, какие проекты интеллектуальной робототехники интересны Сбербанку. Сегодня разберем коботов: историю, классификацию, как на них можно зарабатывать или использовать для решения своих задач.

Источник: Universal Robots
Часть 1. Что такое кобот
Просто назвать своего робота коллаборативным мало. Он должен удовлетворять требованиям международных стандартов, основной из которых ISO/TS 15066:2016(американский аналог ANSI/RIA TR R15.606:2016). Хотя будет правильнее сказать, что это не стандарт, а техническая спецификация. Разница есть: ISO иногда разрабатывает технические спецификации до выпуска окончательных официальных стандартов. Это признание того факта, что современное состояние коллаборативной робототехники динамично, и будет развиваться со временем.
Формат технических спецификаций нужен для фиксации состояния «здесь и сейчас», чтобы сообщество могло работать, зная при этом, что в будущем будут изменения.
Согласно ISO кобот (сокращение от коллаборативный робот) – это робот, предназначенный для прямого взаимодействия с человеком в рамках определенного совместного пространства.
Коллаборативный робот МОЖЕТ использоваться для совместной работы (ISO 10218). Совместная работа – состояние, в котором специально спроектированная роботизированная система и оператор работают в рамках совместной рабочей области.
Совместное пространство – защищенное рабочее пространство, в котором робот и человек могут одновременно выполнять задания во время производственной операции.
Скорее всего, у вас возникли вопросы:


Pixabay.com
Controleng.com
С появлением коллаборативных робототехнических систем эта парадигма сдвинулась: теперь можно работать вместе.


www.objektifhaber.com/aslan-gibi-dostluk-94036-haber
www.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-free
Почему это хорошо? Потому что мы получаем синергию сильных сторон робота (высокая скорость и точность при выполнении рутинных операций) и человека (творческое мышление, работа в нестандартных ситуациях). Это повышает производительность в промышленности, а значит, положительно влияет на экономику в целом.
ISO/TS 15066:2016 – это первая в мире спецификация требований безопасности для коллаборативных роботов. Документ разрабатывался комитетом (куда входили эксперты из 24-х стран и ведущих компаний-производителей) ISO c 2010 года. Он предназначен для дополнения требований и рекомендаций по совместной работе промышленного робота, описанных в стандартах ISO 10218-1 и ISO 10218-2 («Требования безопасности для промышленных роботов»), ISO/TS 15066 определяет требования безопасности для совместной работы промышленных робототехнических систем и рабочей среды. Документ дает руководство для тех, кто проводит оценку рисков при совместной работе людей и роботов.
В соответствии с ISO/TS 15066 есть 4 формы совместной работы:
Рассмотрим каждую из них подробнее
Контролируемая остановка (Safety-rated monitored stop)
Эта форма используется, когда робот действует в основном самостоятельно, но иногда человеку нужно войти в рабочее пространство. Например, робот обрабатывает заготовку, но в середине технологического процесса человек должен сделать с ней операцию, которую не может сделать робот. Если человек войдет в заранее определенную зону безопасности – робот перестанет двигаться. При этом, питание на двигателях не пропадает – они встают на паузу. Это очень важный момент, ведь после того, как человек покинет зону безопасности, робот сразу возобновит работу. Это позволяет не терять время на полный перезапуск рабочей программы как в случае с полной остановкой робота. Если бы люди постоянно проходили мимо робота – он бы попросту не успевал поработать.
Эта форма совместной работы используется для точных операций с тяжелыми объектами (например, установки дверей автомобиля). Эта форма может использоваться для работы с обычными промышленными роботами, но с дополнительным устройством, которое «чувствует» силы, которые рабочий применяет к манипулятору, как правило, это силомоментный датчик на фланце робота.
Здесь окружающая среда робота контролируется световыми барьерами безопасности, которая отслеживает положение людей, как и в первой форме совместной работы. Отличие заключается в сценарии: если в первой форме главная задача робота – остановка, то здесь – одновременная работа человека и робота. Поведение робота будет зависеть от заранее настроенных в его управляющей программе зон: по мере приближения человека, робот снижает скорость своих движений, а если человек подходит настолько близко, что столкновение неизбежно – происходит остановка. По мере отдаления человека, робот возобновляет работу и ускоряется.
Все три описанные выше формы совместной работы могут использоваться с обычными промышленными роботами, при условии наличия дополнительных устройств. Такие решения называются коллаборативные робототехнические системы. Отличие коллаборативного робота в том, что он может не использовать дополнительные (внешние) устройства обеспечения безопасности – они уже встроены в него. Еще одно важное отличие коллаборативных робототехнических систем от коллаборативных роботов состоит в том, что при совместной работе исключается контакт с человеком. А вот коллаборативный робот может контактировать с телом человека без вреда для него. Это достигается за счет ограничения мощности и усилия.
Ограничение мощности и усилия (Power and force limiting)
Большинство людей, представляя кобота, имеют ввиду робота, который использует именно эту форму совместной работы. Поэтому рассмотрим ее подробнее.
В «суставах» робота находятся силомоментные датчики, которые могут определить факт столкновения с человеком. Если датчики обнаруживают превышение допустимых усилий, робот останавливается. Эти роботы также предназначены для рассеивания сил на широкой поверхности, в случае удара – именно поэтому детали их корпуса чаще всего сделаны с округлыми формами. Функционал по ограничению мощности и силы, как правило, входит в штатное ПО.
Контакт в PFL бывает двух типов: переходный (transient) и квази-статический (quasi-Static).
| Переходный контакт | Квази-статический контакт | ||
| Описание | Контактное событие «короткое» ( снижается порог входа для малого и среднего бизнеса (МСБ). 5. «Решоринг» синергия предыдущих факторов приводит к тому, что США и ЕС возвращают производство из Китая к себе на родину. Это может способствовать сокращению расходов на морскую логистику и повышению качества продукции. 6. Государственные программы, направленные на автоматизацию и роботизацию производства. Они могут стимулировать и поддерживать (в том числе финансово) приобретение и использование роботов: — «Industry 4.0» в Германии; Часть 4. Кто производит коботов
Часть 5. Как на коботах можно заработать и как их использовать для решения своих задачКак заработать на коботах: | Просто автоматизировать | Сложно автоматизировать |
| Задачи | Перемещение предметов, следование траектории без усилия или с постоянным усилием | Контроль усилия, например, полировка или точная сборка | |
| Предметы | Небольшое разнообразие предметов (размеры, масса, материал), известные и обычные формы (цилиндр, параллелепипед) | Большое разнообразие предметов, сложные формы, деформирующиеся и хрупкие предметы | |
| Расстановка предметов | Предметы ровно уложены: в коробку, стопку или на паллете | Предметы свалены в коробку/корзину или двигаются на быстром конвейере | |
| Интеграция с другим оборудованием | Использование интерфейсов, которые использует человек: кнопки, ручки | Подключение и настройка датчиков, программная интеграция со станками | |
| Программирование | Повторяющиеся движения в одной последовательности (без условий и деревьев) | Сложная логика и множество условий в зависимости от информации с датчиков |

Здесь можно рассчитать ROI вашего проекта по роботизации
В статье использован перевод следующих публикаций:
Коллаборативный робот: что это такое — определение и применение
Содержание
Что такое коллаборативный робот — определение и описание
HCR (human-robot collaboration — сотрудничество человека и робота) — довольно молодая концепция, но очень активно развивающаяся и уже нашедшая применение на многих предприятиях. Коллаборативный робот — робот созданный для совместной работы с человеком, спроектированный так, чтобы не подвергать опасности находящегося рядом работника.
Учитывая специфику, коботы, они же коллаборативные роботы или роботы-помощники как правило не превосходят размерами человека (хотя бывают и крупные) и всегда имеют специальные датчики для обеспечения его безопасности — оптические, датчики движения, датчики обратной связи. Да и само ПО таких роботов ориентировано на сотрудничество с человеком.

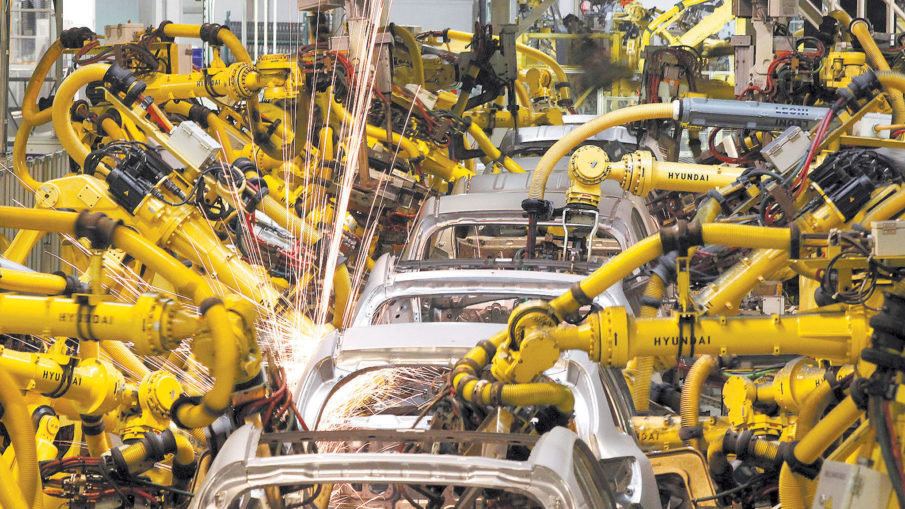
Именно это отличает коллаборативных роботов, иначе называемых коботами, от других промышленных роботов, для которых обязательна выделенная и огороженная зона, защищающая как живых сотрудников — от опасности получения травмы, так и самих роботов — от помех при работе. Коллаборативная робототехника, как отрасль, производит аппараты, которым такое разграничение не нужно, что экономит средства на оборудовании техники безопасности и площади предприятий.
Что может коллаборативный робот, для чего применяется

Наличие коботов дает конкурентное преимущество практически любому предприятию — применений им можно найти множество, так как они экономят время работников и ресурсы компании, позволяя сделать больше за то же количество человеко-часов.
О том, чем может помочь коллаборативный робот на предприятии, читайте дальше.
Сбор, размещение, сортировка

На каждом производственном или упаковочном предприятии нужны сбор и размещение. Например — сбор деталей с конвейерной ленты или раскладка их для дальнейших операций. Коллаборативный робот-манипулятор не устает и не теряет внимания, что практически исключает ошибки на данном этапе. Коботы выполняют повторяющиеся задачи с высокой точностью.
Литье

Коллаборативные роботы увеличивают производительность и безопасность литьевого производства, выполняя утомительные или опасные для человека функции, их применение наиболее эффективно в союзе с живыми сотрудниками.
Работа со станками с ЧПУ

В выполнении повторяющихся однообразных задач никто не сравнится с эффективностью и скоростью кобота. Коллаборативные роботы созданы специально для выполнения таких задач, и в их число входит работа со станками с ЧПУ, в числе возможностей которых фрезерование, токарные операция, шлифование, резка многое другое. Выемка и раскладка готовых деталей из станка, загрузка заготовок, уход за оборудованием — то, что ваш кобот может делать в то время, когда живой сотрудник выполняет более сложные задачи.

Упаковка и укладка на поддоны

Коботам не требуется помощь для сборки деталей с конвейера и укладки их в коробки или на поддоны. Это простая задача, на которую непозволительно дорого тратить время квалифицированного сотрудника. Отсутствие человека на этом участке ускоряет работу линии, что увеличивает производительность всего предприятия и, в конечном итоге, снижает себестоимость продукции и увеличивает прибыль.
Контроль качества

Фото kuka.com: Коботы облегчают контроль качества и выполнение постобработки.
Применение коллаборативных роботов на этапе контроля качества предполагает максимальное снижение вероятности ошибки и повышение точности измерений, так как контролирующие качество роботы могут использовать широкий ассортимент высокоточных датчиков и измерительных приборов — оптических, механических, 3D-сканирующих и т.д., что повышает качество продукции и сводит вероятность брака к исчезающе малым значениям.
Сборочные работы

Раньше промышленные роботы применялись при сборке автомобилей, самолетов и кораблей. С помощью коботов можно собирать как крупные изделия, так и миниатюрные, вплоть до микроэлектроники.
Полировка

Полировка с применением ручного труда, даже механизированного, требует очень много времени. Коботы же не устают и совершают точно заданное количество движений, что делает процесс полировки не только простым, но и унифицированным — размеры получающихся в результате шлифовки и полировки поверхностей можно задавать с микронной точностью.
Обслуживание оборудования

Фото ptonline.com: EVCO использует кобота UR для сбора готовых деталей на 3D-ферме.
Коботы идеальны для выгрузки готовых деталей из станков любого типа, включая станки с ЧПУ, в том числе 3D-принтеры. Эта низкоквалифицированная и однообразная работы выполняется ими наилучшим образом и без свойственной людям потери внимания — напечатанная на 3D-принтере деталь извлекается немедленно и он начинает печатать следующую, а значит оборудование не простаивает ни минуты.
Сверление и закручивание, сварка, дозирование и склеивание
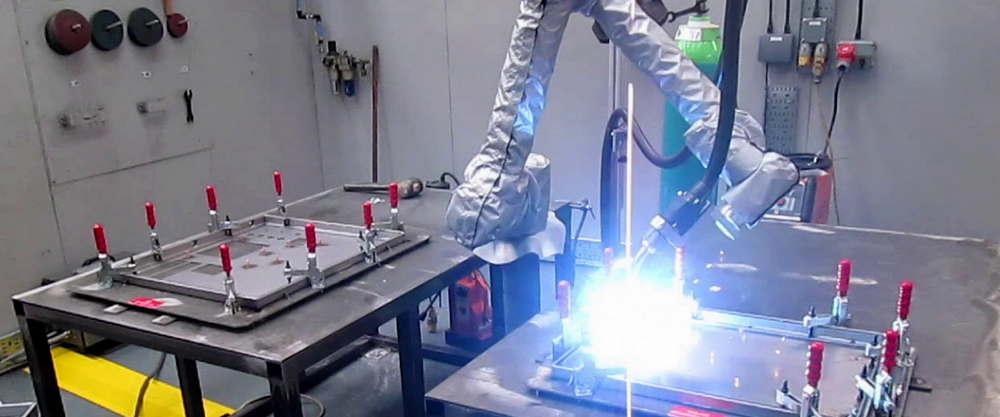
Коботы представляют идеальное решение для сварных работ и позволяют повысить эффективность, производительность, точность и сократить расходы. Квалифицированный сварщик-человек — персонал недешевый, с регламентированным рабочим днем и способный совершать ошибки. Это же касается и других упомянутых операций.
Лабораторный анализ и тестирование

Фото Universal Robots: кобот UR в L’Oréal India.
Коботы — наиболее безопасная альтернатива человеческой рабочей силе при проведении чувствительных и опасных лабораторных испытаний. Кроме того, благодаря высокому уровню точности и минимальной вероятности ошибки, их применение предпочтительно и для любого лабораторного анализа.
Кейсы применения
Коботы применяются ведущими автопроизводителями на разных участках сборочных линий. Робот Kuka LBR iiwa и сотрудник завода BMW в Дингольфинге работают вместе.

Посмотреть модели коботов Kuka и выбрать подходящие можно здесь.
Fanuc
Немецкий производитель цепных пил STIHL, уже использующий на своем производстве сотни роботов, запустил производственную линию с коллаборативными роботами.
FANUC CR-35iA — самый сильный коллаборативный робот в мире, он один заменяет весь персонал конвейера на линии упаковки дисковых ножей.

Посмотреть модели коботов Fanuc и выбрать подходящие можно здесь.
Hanwha
Кобот Hanwha HYRobotics’s HCR-5 производит финишную обрезку деталей полученных в результате литья под давлением.

Посмотреть модели коботов Hanwha и выбрать подходящие можно здесь.
Universal Robots
Испанский производитель кейсов, кофров и сидений для мотоциклов SHAD, европейский лидер по производству подобной продукции, включил кобота UR5 в производственный процесс фабрики в Mollet del Valles. Коллаборативный робот оптимизировал производство и улучшил условия труда для рабочих. В частности, при пайке пластика им больше не нужно вдыхать испарения ABS.

Посмотреть модели коботов Universal Robots и выбрать подходящие.
Заключение
Коллаборативные роботы получают все большее представительство в лабораториях, цехах и мастерских не просто так, а благодаря их эффективности, производительности и экономичности.
Если вы хотите повысить эффективность своего предприятия, добавьте в коллектив коллаборативных роботов для самых рутинных и требующих точности и постоянства задач и дайте сотрудникам возможность проявить себя в выполнении более творческих обязанностей. Вы увидите — работая вместе, они повысят ключевые показатели продуктивности производственных процессов и качества продукции.
Для выбора и приобретения максимально соответствующих вашим задачам коллаборативных роботов обращайтесь в Top 3D Shop.
Подписывайтесь на наш телеграм-канал с отборными кейсами Роботизации и Автоматизации со всех уголков мира:
Коботы. 10 фактов о коллаборативных роботах
 Материал подготовил: Аркадий Софрыгин, основатель сайта Беспилот.
Материал подготовил: Аркадий Софрыгин, основатель сайта Беспилот.
Присоединяйтесь к обсуждению темы в Facebook
Подписывайтесь на наш телеграм-канал

Что такое коллаборативные роботы?
Коботы созданы для помощи людям в решении тех задач, которые не получится автоматизировать на 100%.
Чем коботы отличаются от промышленных роботов?


10 фактов о коботах
2. Коботы не угрожают жизни и здоровью людей. Есть случаи гибели людей от промышленных роботов, а зону работы промробота ограничивают ограждениями. При этом коллаборативные роботы заявляются производителями как абсолютно безопасные для работающих рядом людей. Кобот оснащен специальными датчиками (датчики движения и обратной связи, оптические сенсоры), он останавливается при случайном контакте с человеком и не может принести ему вред.
3. Коботы более просты в программировании. Действия коллаборативного робота с помощью специального планшета может запрограммировать любой человек. При этом коботы не требуют специально оборудованных помещений и создание огороженных зон для работы, в отличие от промроботов. Кобот выполняет повторяющиеся действия намного точнее, а иногда и быстрее, чем человек.
4. Первый кобот в современном виде был выпущен в 2008 году. Это сделала датская компания Universal Robotics, которая впоследствии стала одним из лидеров на мировом рынке коботов.



6. Коботы маленькие. Большинство коботов в высоту не больше 1.5 метра и весом до 20 кг. Их можно быстро перемещать с места на место и перепрограммировать под разные задачи, в том числе под совместную работу со станками ЧПУ. Хотя встречаются и крупные коботы, но это скорее исключение из правил.
10. Коботы могут стать первым шагом к автоматизации вообще всего. Возможно, при снижении цены на интеграцию, через 20-30 лет коботы станут таким же привычным явлением, как сейчас автомобили или мобильные телефоны. И будут использоваться практически на каждом современном производстве или сборочной линии.
Смотрите видео о популярных коботах.